(2ª edición)
 Durante las tardes de los martes de octubre de 2009 a mayo de 2010 nos reunimos para aprender el funcionamiento de microbots y construir nuestros propios módulos electrónicos, programar nuestros propios microcontroladores y ensamblar nuestra propia mecánica para poder construir microbots funcionales desde cero que puedan utilizarse para múltiples tareas.
Durante las tardes de los martes de octubre de 2009 a mayo de 2010 nos reunimos para aprender el funcionamiento de microbots y construir nuestros propios módulos electrónicos, programar nuestros propios microcontroladores y ensamblar nuestra propia mecánica para poder construir microbots funcionales desde cero que puedan utilizarse para múltiples tareas.
Construimos unas placas principales muy simples y un conjunto de módulos electrónicos que se conectarán a estas placas principales. Una vez construidos varios módulos podrán utilizarse unos u otros para hacer distintos robots orientados a distintas tareas. Para la parte de la electrónica se usa la información de Curuxa.org.
Tenemos pensado construir los siguientes módulos:
- Placa principal (con microcontrolador y pines para poder conectar el resto de módulos a ella) hecha en placa perforada.
- Módulos de pulsadores y bumpers.
- Módulo de LEDs indicadores.
- Módulo de control de motores, con el que aprenderemos a hacer circuitos impresos desde cero.
- Chasis, ruedas, trucado de servos.
- Control de velocidad de motores, posicionamiento de servos y generación de sonidos mediante PWM.
- Sensor de distancia y conversor analógico-digital.
- Sensores de blanco/negro.
- Software de desarrollo electrónico.
- Regulador de tensión.
- Control por mando a distancia.
- Brazo robótico simple.
A estos talleres puede asistir cualquier alumno de la Universidad de Oviedo. Puedes participar tanto si eres un experto en electrónica y/o programación como si no sabes absolutamente nada. Aprenderás cómo funciona y construirás tu propio robot por muy poco dinero, únicamente lo que cuestan los materiales (que serán los que tú quieras comprar).
También puedes informarte sobre los talleres que organizamos el año pasado, los cuales fueron un éxito. ¡Este año serán mejor aún!
En principio las piezas de tu robot deberás pagarlas tú mismo. Haremos pedidos conjuntos para obtener buenos precios, y el coste total será muy inferior al de cualquier robot comercial. Por supuesto todo lo que compres y construyas te pertenecerá.
Si ya tienes conocimientos previos de electrónica y programación y estos robots te parecen muy simples, puedes asistir a las reuniones a diseñar y construir el robot que te apetezca, o simplemente a enseñarnos las cosas que has hecho por tu cuenta. Allí encontrarás a gente con tus mismas inquietudes y, si necesitas ayuda, seguro que la encontrarás.
Programa
2 octubre 2009
- Charla: Presentación de los talleres
- Inscripciones
- Primer pedido de componentes
- 20€ – componentes:
- 1x MBP18.
- 2x SISW-SPST con bumpers.
- 1x SISW-SPST con pulsador.
- 3x LTIND-A.
- Componentes y material necesario (los productos químicos) para construir MC2A en PCB.
- 5€: polímetro simple.
- 20€ – componentes:
13 octubre 2009
- Charla: Introducción a los talleres. Microcontroladores. Construcción de MBP18. Placas perforadas. Estañado.
- Entrega de material.
- Taller: Construcción de MBP18.
Necesario traer:
- Estañador y estaño.
- Caja pequeña para meter los componentes que os demos y las cosas que vayáis haciendo. Algunas personas el año pasado se traían una caja de herramientas en la que metían los componentes, placas, y todas las herramientas que traían. Es una buena idea, aunque una simple caja vacía también sirve.
Recomendable traer:
- Ordenador portátil.
20 octubre 2009
- Charla: Microcontroladores, lenguajes, grabadoras, SDCC.
- Taller: Fabricación de MBP18. Programación de microcontroladores.
Necesario traer:
- Estañador y estaño.
- Componentes que ya tengas.
MUY recomendable traer:
- Ordenador portátil, con los programas que hayas elegido a usar, de entre los explicados en http://curuxa.org/en/Getting_started#Step_4_-_Write_a_program_for_your_microcontroller
- Polímetro.
27 octubre 2009
- Taller: Fabricación de MBP18. Programación de microcontroladores.
Necesario traer:
- Estañador y estaño.
- Componentes que ya tengas.
Muy recomendable traer:
- Ordenador portátil.
- Polímetro.
3 noviembre 2009
- Pedido a Microchip.
- Charla: Sensores de contacto (pulsadores, interruptores) y señalización (LEDs).
- Taller: Fabricación de SISW-SPST y LTIND-A.
10 noviembre 2009
- Taller: Fabricación de SISW-SPST y LTIND-A
- Pago de motores, servos, aluminio y componentes:
- Componentes – 17€
- 1x Servo Futaba S3003.
- 1x módulo altavoz piezoeléctrico.
- Tornillos y aluminio para construir el chasis del robot.
- Rueda loca.
- 4x pilas recargables NiMH (aprox 1 Amperio·hora) – 8.50€
- 2x Servos de baja calidad para trucar y usar como ruedas – 7€
- 2x Motores con reductora, calidad aceptable, eje difícil de ajustar rueda – 10€
- 2x Servos de buena calidad para trucar y usar como ruedas – 20€
- Componentes – 17€
17 noviembre 2009
- Último día para el pago de motores, servos, aluminio y componentes.
- Charla: Fabricación de PCBs.
- Taller: Fabricación del módulo de control de motores (MC2A).
24 noviembre 2009
- Charla: Control de motores.
- Taller: Fabricación del módulo de control de motores (MC2A).
1 diciembre 2009
- Taller: Fabricación del módulo de control de motores (MC2A).
15 diciembre 2009
- Charla: Motores. Trucado de servos.
- Taller: Construcción del chasis para el robot.
22 diciembre 2009
- Pago componentes para 2º cuatrimestre.
- Taller: Construcción del chasis para el robot.
12 enero 2010
- Pedido componentes para 2º cuatrimestre.
- Charla: Funcionamiento y aplicación de PWM.
- Taller: Control de servomotores, altavoces y velocidad motores.
19 enero 2010
- Pedido componentes para 2º cuatrimestre.
- Taller: Control de motores, servomotores y altavoces.
23 febrero 2010
- Pedido y entrega de material.
- Charla: Sensores de reflectividad CNY70.
- Taller: Fabricación del módulo de detección de blanco/negro.
2 marzo 2010
- Taller: Fabricación del módulo de detección de blanco/negro.
9 marzo 2010
- Taller: Fabricación del módulo de detección de blanco/negro.
16 marzo 2010
- Charla: Reguladores de tensión.
- Taller: Fabricación del módulo regulador de tensión.
23 marzo 2010
- Taller: Tiempo para terminar de construir los robots.
6 abril 2010
- Taller: Tiempo para terminar de construir los robots.
Circuitos opcionales
Si te sobra tiempo en el taller por haber terminado los circuitos muy rápido o por haberlos hecho en casa, también tienes disponibles las siguientes placas:
Nota: las Placas Principales y Módulos publicados en la web de Curuxa.org pero que no están en esta lista como circuitos opcionales, probablemente significa que está previsto hacerlos en los talleres.
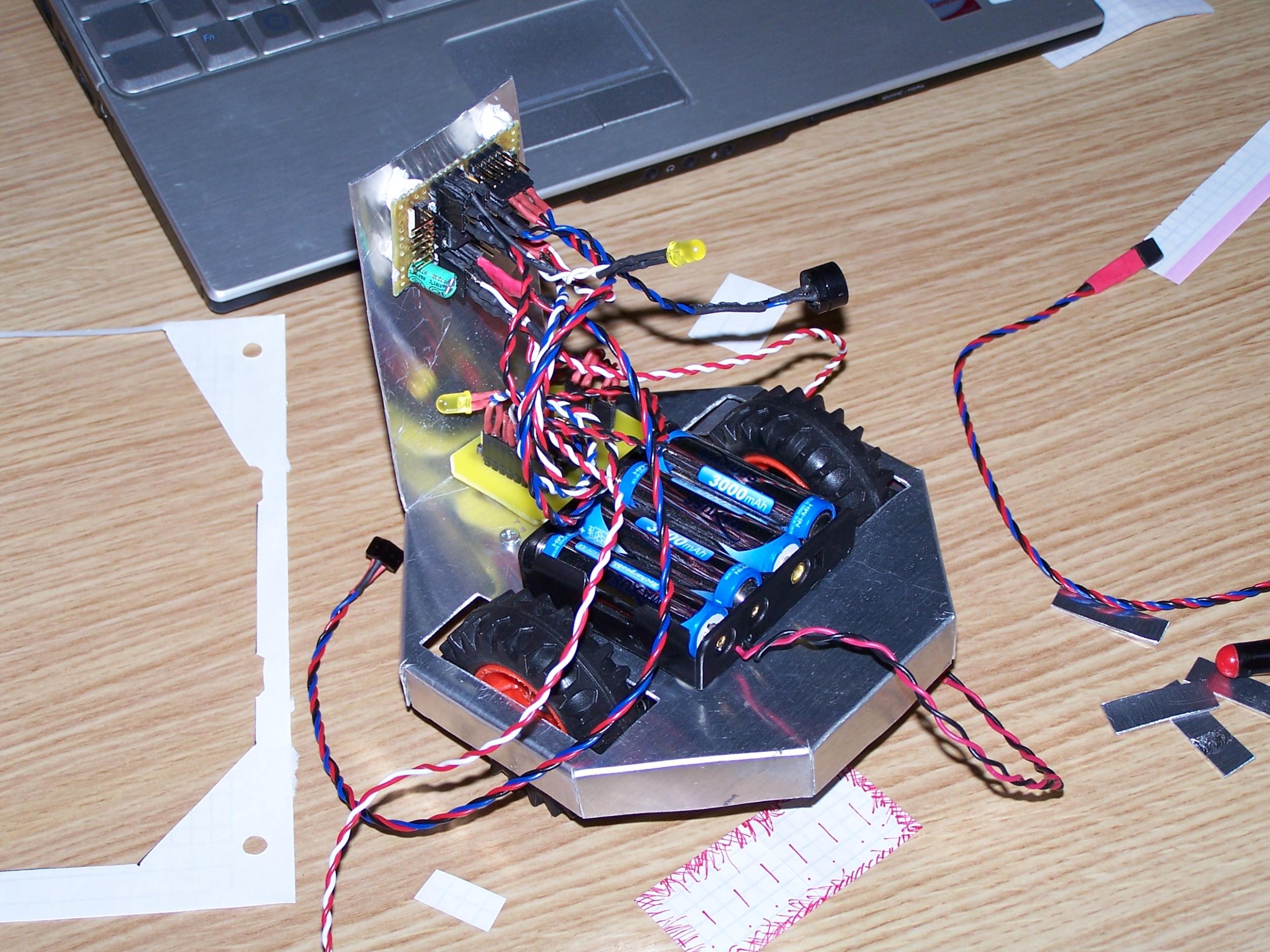
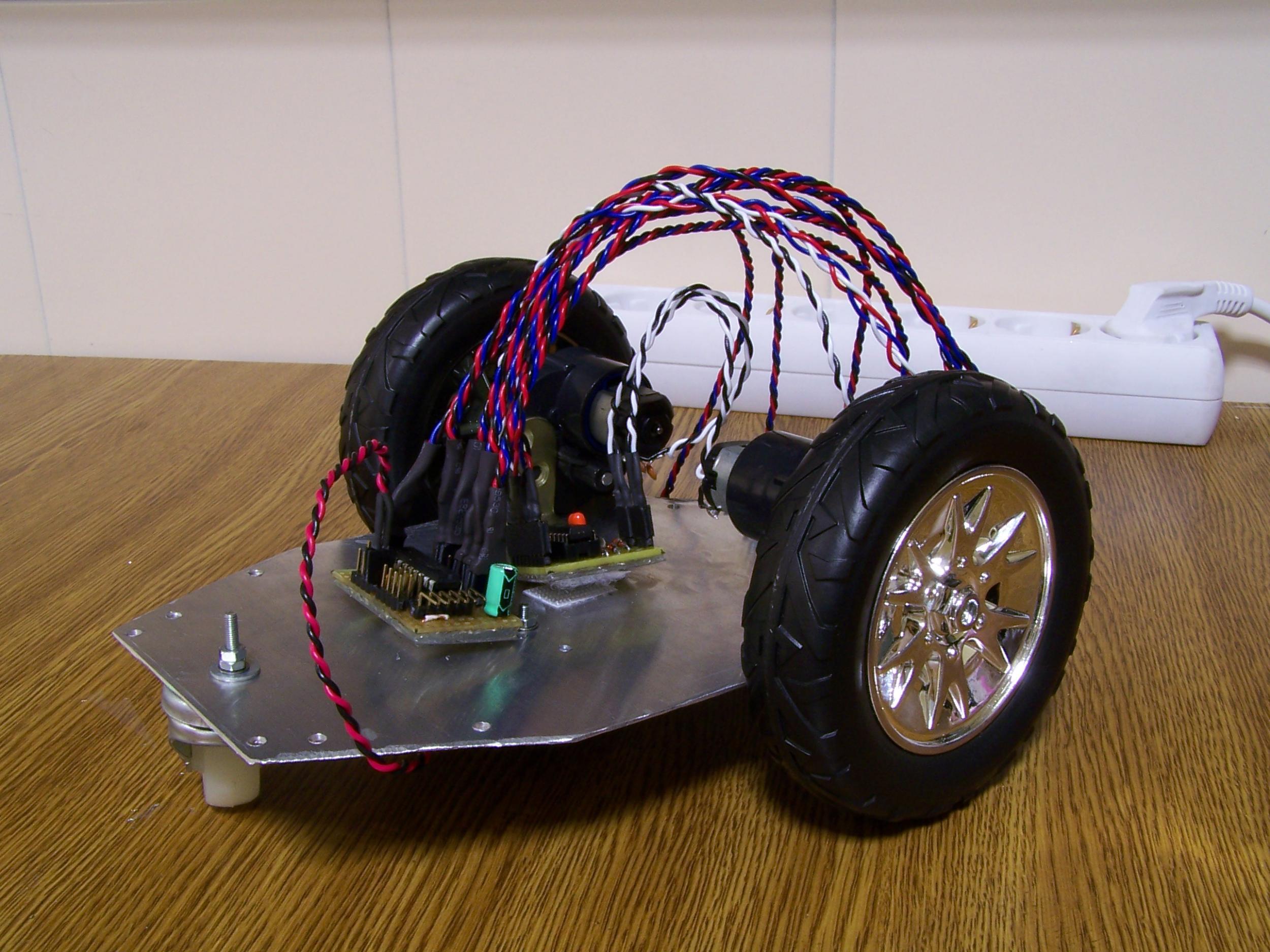
Fotos





Agradecimientos
Agradecemos la ayuda de Juan Ángel, Mike y Juan Carlos para conseguir el aula, laboratorio y algo de material para estos talleres de robótica.